8月23日,由我校牵头基于水下主从式高动态范围三维全景感知探测设备的国家自然科学基金重大仪器项目团队举行阶段性工作交流会。项目负责人罗钟铉教授,项目组成员樊鑫教授、雷娜教授、常玉春教授、李豪杰教授、王雷教授,刘日升教授等参加会议。

重大项目研究团队的水下成像芯片、水下立体视觉、水下全景数据生成、水下自主学习、水下通信、边缘设备深度学习、水下环境感知和基础平台八个小组,分别对目前工作进度和下阶段工作计划进行汇报。与会教师从模块协作、项目执行、成果应用等方面都给出了专业性意见,积极为面向领海与专属经济区重要战略空间的海洋智能监测、观测与作业装备的海洋强国战略重大需求的突破性解决出谋划策、凝聚共识。
罗钟铉教授对会议进行总结,理论研究离不开实践验证,水下无人系统作为水下智能作业不可或缺的一部分设备,是巩固我国海洋安全、国防安全、助力国家“海洋强国”伟大战略的重要研究方向,其对环境感知和认知能力将成为认识海洋及经略海洋的基础性关键问题。各个模块研究组既要在各自领域中有专攻的推进,也要在项目整体执行中有效的协调和衔接。由我校主推的大连海洋智能装备评测与试验基地目前也在稳步筹备和建设,这对重大项目研究与验证起到重要平台支撑作用,也希望全体项目组成员共同参与到这个国际化标准、全国性应用的高水平、高起点的基地建设。
讨论会后,团队成员们来到獐子岛海域,进行了监控数据采集和水下机器人实地操作实验。实验团队布控检测数据点,进行环境和水质的监控以及水面远程通信的实验。
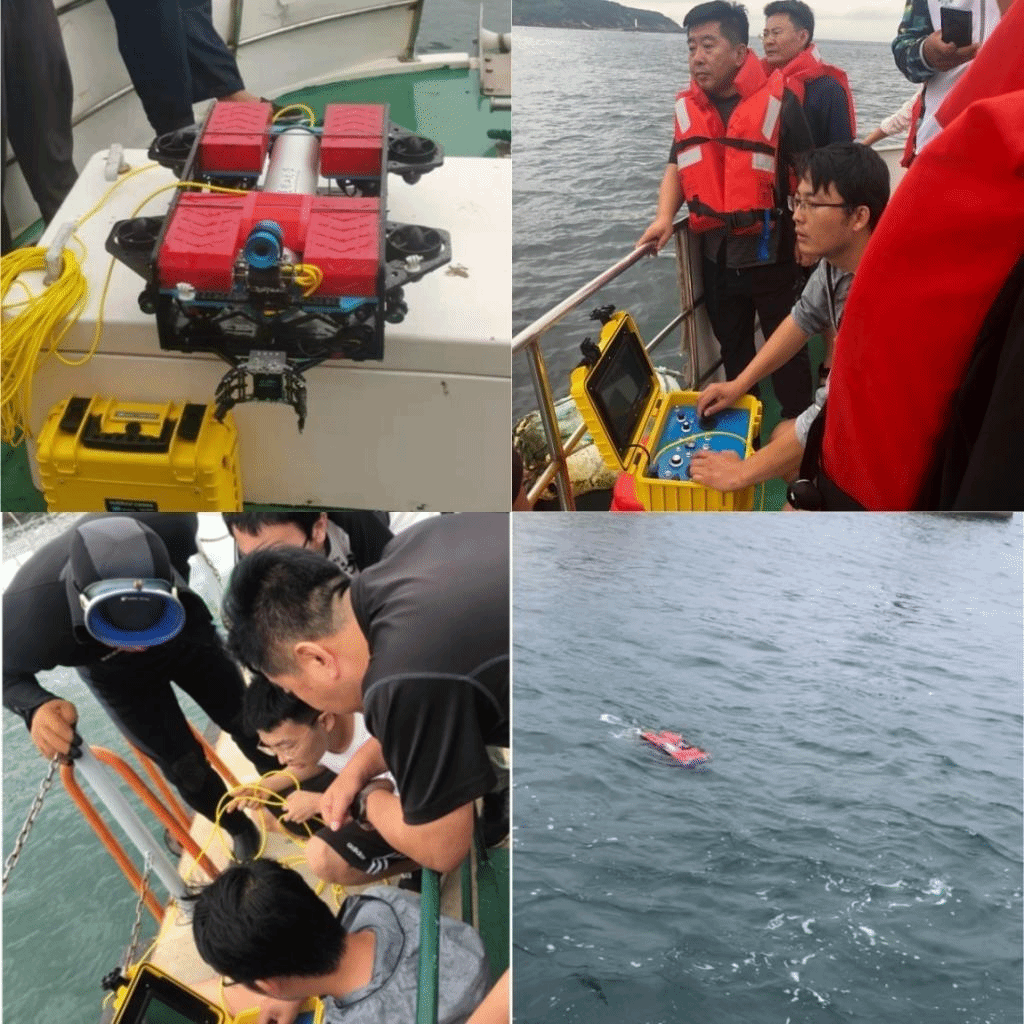
水下机器人在近海区域下水,从机器人视角对海况进行了勘察和数据收集,作业过程也引来了当地潜水员的关注,从潜水员实际操作的经验与水下机器人作业姿态进行比较和交流,探讨如何解决机器人在水下应对洋流及其他复杂海底环境影响等问题,以期尽早实现用机器人代替人工高危性作业项目,实现人机协同甚至机器人自主高效作业的目标。
